1127B Benfield Blvd
Millersville, MD 21108
410-987-1552
1127B Benfield Blvd
Millersville, MD 21108
410-987-1552
The versatile and affordable design of SSC's compact acoustic sensor may be adapted to meet multiple customer specifications. This page highlights tracking of ground and air vehicles with internal combustions engines. Algorithms for impulsive sources (gunshots, mortars, explosives, etc) have been developed. Applications have been explored for tracking small drones, detecting and localizing voices, and interpreting ship's horn and bell signals.

Signal Systems Corporation (SSC) is developing the Maritime Acoustic Sensing Unit (MASU) to provide situational awareness to manned and unmanned naval assets. The MASU leverages our innovative acoustic chambered design developed for robotic vehicles to provide a compact rugged, self-contained sensor capable of detecting, locating and classifying sounds. We plan to demonstrate the capability of our compact sensor design to provide 360° detection, localization and classification of standard COLREGS signals out to one mile. We will improve our signal processing algorithms to detect and discriminate these sounds from non-navigational signals and develop a robust decision tree based classifier that will identify the signals to the operator. We will evaluate physical sensor design improvements to address the flow, wind, and platform noise effects, enabling us to meet the one mile detection range with good bearing accuracy.
Benefits include: Situational awareness for any robotic vehicle. Specifically the Navy's Common Unmanned Surface Vehicle (CUSV), Adaro ASV, Medium Displacement USV, The Army's Unmanned Ground Vehicle (UGV), and as a Sound Reception Device on commercial ships.

SSC is building a low power tri-axial acoustic sensor that leverages our existing acoustic chambered design to provide a directional sensor that has high sensitivity, rugged construction with low power consumption. Our approach extends prototypes developed under DoD sponsorship, including DARPA efforts. Our innovative chambered design provides a large physical aperture that includes novel wind noise reduction features without exposing sensitive microphone elements to the environment directly. The unit exhibits increasing acoustic gain at higher frequencies that help in classification of targets that have weak high frequency signature information.
Download the ASU Brochure (PDF 148kB)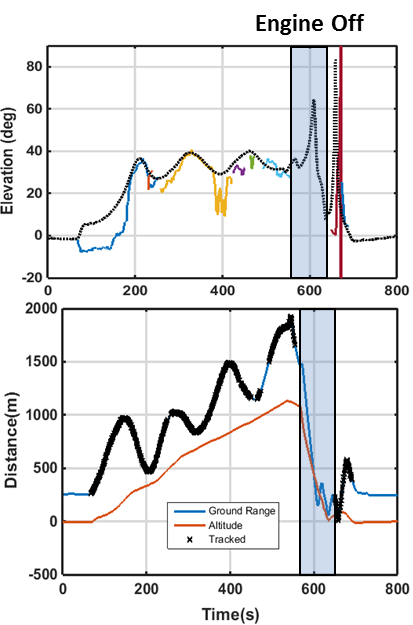
The two plots illustrate the elevation sensing performance against an ultralight target. In the top graph, the black dotted line is the ground truth, the actual, GPS measured elevation angle of the ultralight relative to the ASU. The colored lines show the ASU's elevation estimate at the time. During the highlighted blue region shows, the pilot turned off the engine
The lower plot shows the altitude and distance along the ground the ultralight was from the ASU. The black highlighted areas indicated where the ASU was tracking the ultralight
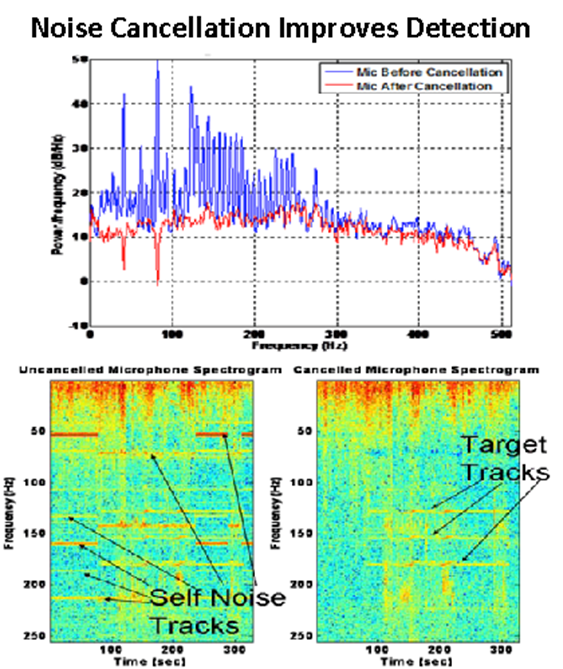
The image shows the usefulness of employing active notice cancellation algorithms in the detection and tracking process. The top plot shows how the tones from the vehicle can be removed from the microphone data. The images below that show how active noise cancellation prevents the ASU from tracking the vehicle it is mounted on.